
- Panoramica
- Descrizione del prodotto
- Parametri del prodotto
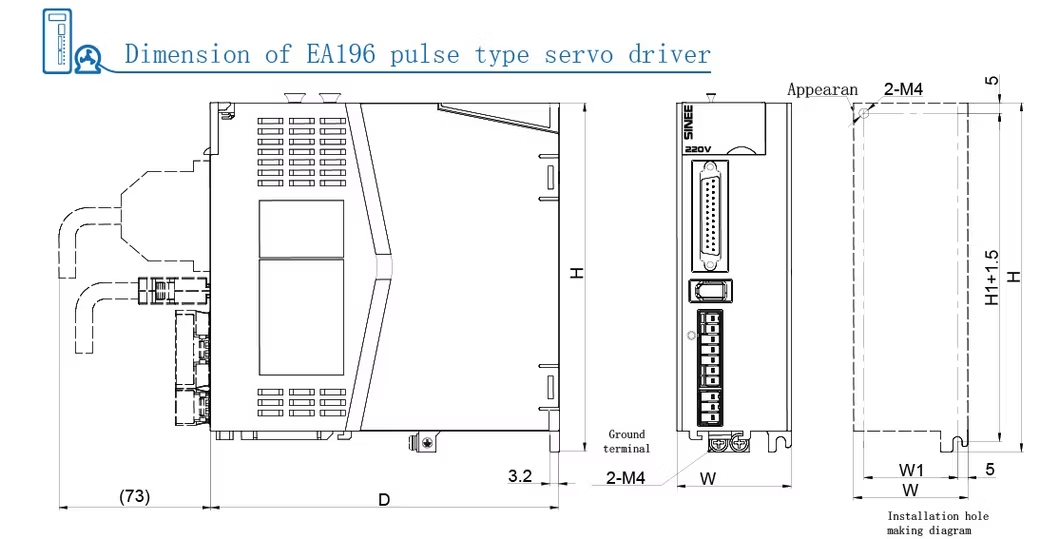
- Istruzioni di installazione
- Profilo aziendale
Informazioni di Base.
Model No.
EA196
Stato
Nuovo
Su misura
Su misura
Materiale
Lega di alluminio
metodo di controllo
svpwm, controllo vettoriale
metodo di raffreddamento
raffreddamento della ventola
pannello anteriore
5 tasti, led a 5 cifre
funzione di comunicazione
modbus rtu
limite di coppia
limite di impostazione digitale
modalità di controllo dei comandi
comando di coppia digitale
modalità di livellamento dei comandi
filtraggio passa-basso
limite di velocità
limite di impostazione digitale
Pacchetto di Trasporto
Wooding
Marchio
SINEE
Origine
Repubblica Popolare Cinese
Capacità di Produzione
400000sets/Year
Descrizione del Prodotto
Servoazionamento serie EA196
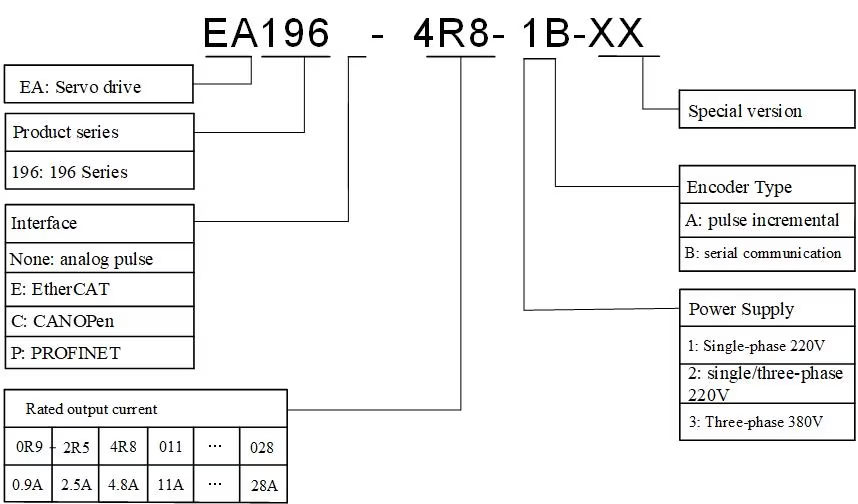
Monofase 220 V~240 V 0.2~0,75 kW
•Risposta ad alta velocità
•posizionamento ad alta precisione
•facile da usare
1. Adotta MCU speciale avanzato per il controllo del motore e modulo di potenza PIM, che ha le caratteristiche di elevata integrazione, dimensioni ridotte, protezione perfetta e alta affidabilità.
2. L'algoritmo di controllo PID ottimizzato consente un controllo digitale preciso di coppia, posizione e velocità, con elevata precisione e risposta rapida.
3. Dispone di interfacce digitali complete, supporta il protocollo di comunicazione MODBUS ed è comodo per la rete.
4. La serie EA196 supporta vari servomotori a magnete permanente AC con encoder incrementali magnetici e fotoelettrici a 17 bit e encoder fotoelettrici assoluti a 23 bit che utilizzano il protocollo RA-CODER, soddisfacendo diversi requisiti in termini di costi e prestazioni.
5. Può essere ampiamente utilizzato in settori di automazione come le apparecchiature 3C, le macchine per la stampa e il confezionamento, le macchine tessili, i robot e le linee di produzione automatizzate.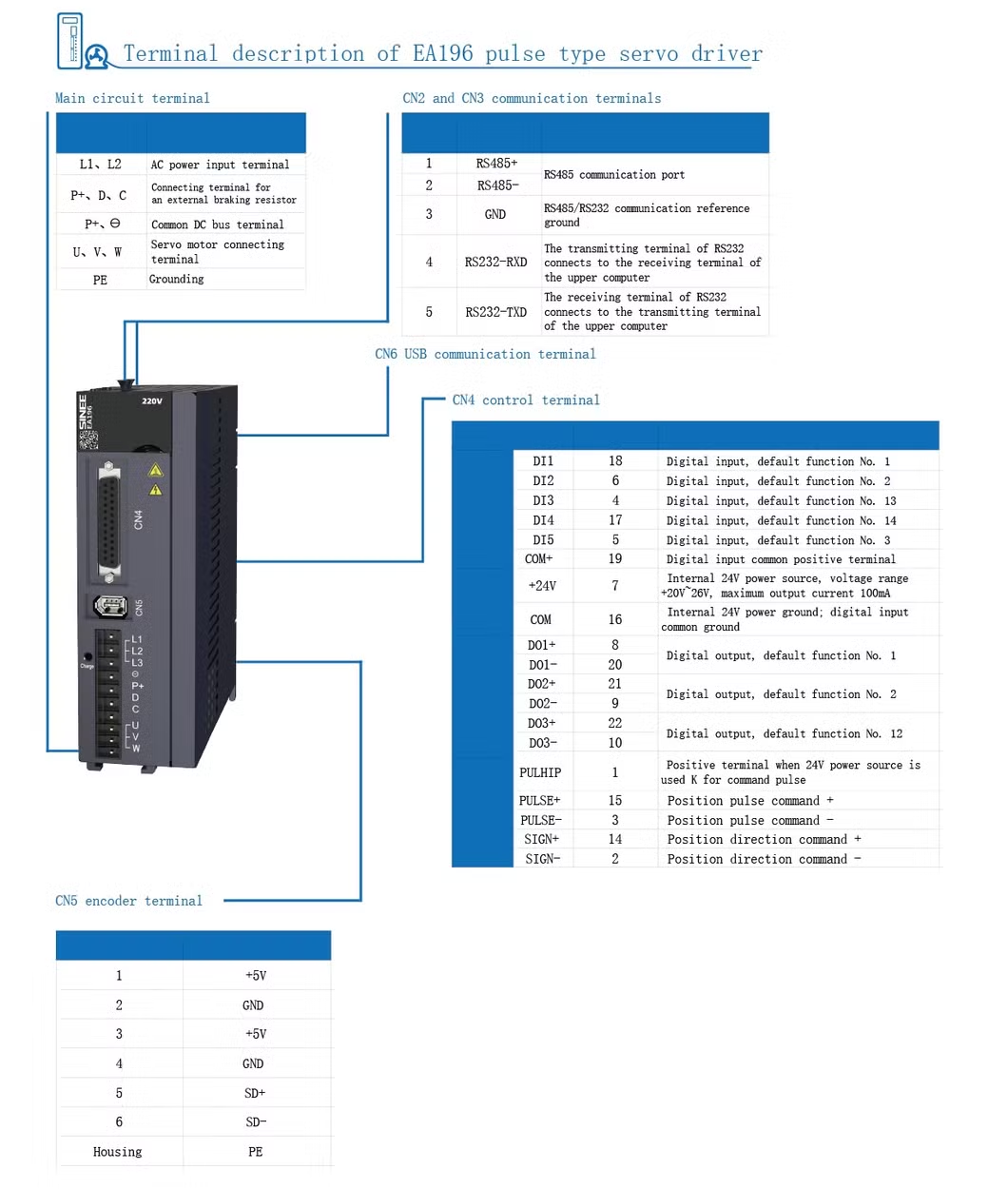






Monofase 220 V~240 V 0.2~0,75 kW
•Risposta ad alta velocità
•posizionamento ad alta precisione
•facile da usare
1. Adotta MCU speciale avanzato per il controllo del motore e modulo di potenza PIM, che ha le caratteristiche di elevata integrazione, dimensioni ridotte, protezione perfetta e alta affidabilità.
2. L'algoritmo di controllo PID ottimizzato consente un controllo digitale preciso di coppia, posizione e velocità, con elevata precisione e risposta rapida.
3. Dispone di interfacce digitali complete, supporta il protocollo di comunicazione MODBUS ed è comodo per la rete.
4. La serie EA196 supporta vari servomotori a magnete permanente AC con encoder incrementali magnetici e fotoelettrici a 17 bit e encoder fotoelettrici assoluti a 23 bit che utilizzano il protocollo RA-CODER, soddisfacendo diversi requisiti in termini di costi e prestazioni.
5. Può essere ampiamente utilizzato in settori di automazione come le apparecchiature 3C, le macchine per la stampa e il confezionamento, le macchine tessili, i robot e le linee di produzione automatizzate.

| In funzione condizioni | Temperatura | Temperatura di esercizio 0~40° , temperatura di stoccaggio -20° ~85° | |||
| Umidità | Funzionamento/stoccaggio: ≤ 90% UR (senza condensa) | ||||
| Altitudine | ≤ 1000 m. | ||||
| Vibrazione | ≤ 4,9 m/s2, 10~60 Hz (non è consentito alcun funzionamento nel punto di risonanza) | ||||
| Metodo di raffreddamento | Raffreddamento della ventola | ||||
| Metodo di controllo | SVPWM, controllo vettoriale | ||||
| Sei modalità di controllo | Controllo velocità, controllo posizione, controllo coppia, controllo velocità/posizione, controllo coppia/velocità, controllo posizione/coppia | ||||
| Pannello anteriore | 5 tasti, LED a 5 cifre | ||||
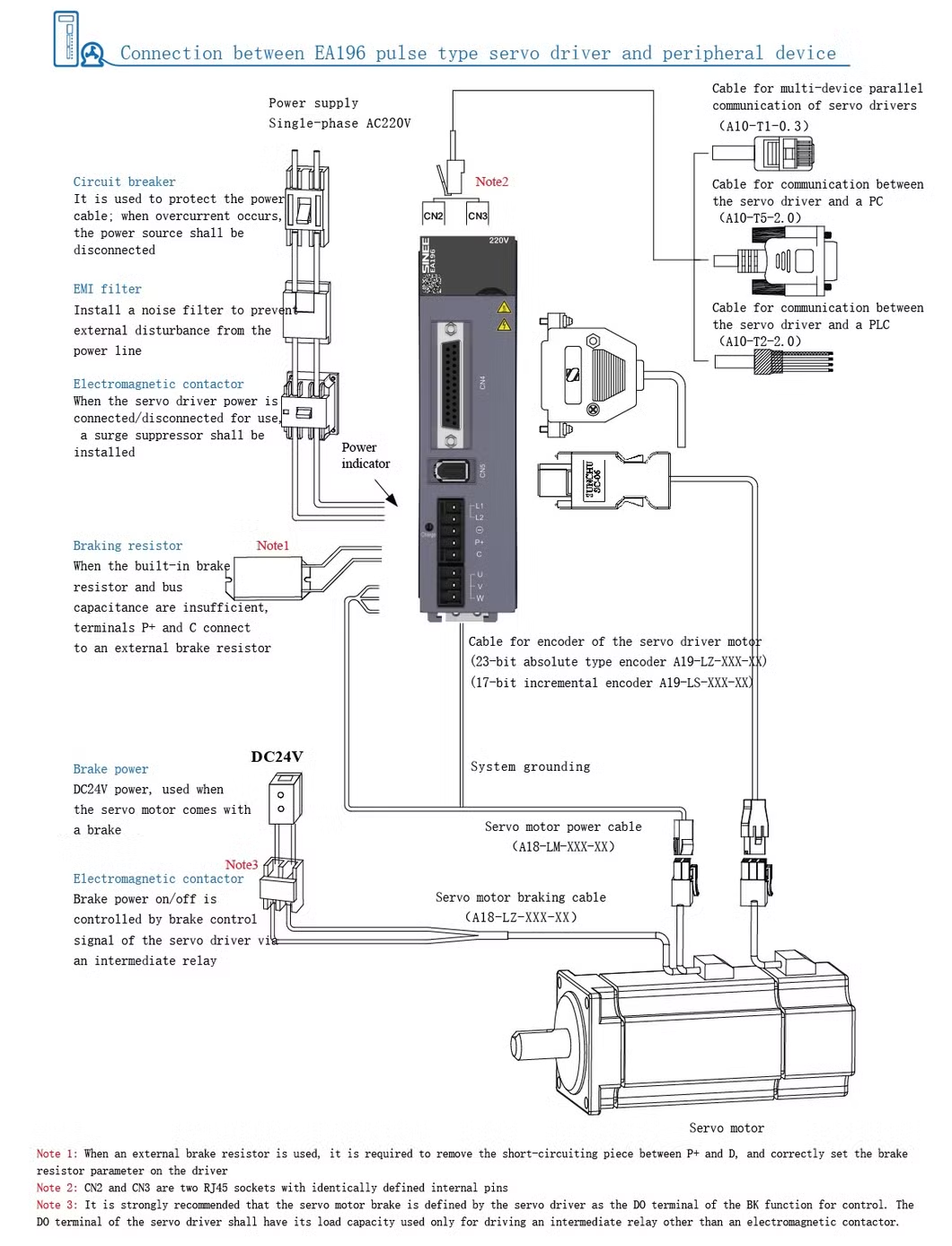
| Freno rigenerativo | Unità frenante e resistenza integrati; è possibile collegare una resistenza frenante esterna | ||||
| Modalità di feedback | encoder incrementale a 17 bit/assoluto a 23 bit | ||||
| Ingresso/uscita digitale | Ingresso | Servo start, reset allarme, cancellazione contatore deviazione impulso posizione, selezione direzione comando velocità, commutazione multisegmento posizione/velocità, attivazione comando interno, controllo Commutazione modalità, disattivazione impulsi, disabilitazione guida in avanti, disattivazione guida in retromarcia, avanzamento in pollici, pollici indietro | |||
| Uscita | Servocomando pronto, uscita freno, uscita rotazione motore, segnale velocità zero, avvicinamento velocità, velocità raggiunta, avvicinamento in posizione, limite di coppia, limite di velocità di rotazione, uscita di avvertimento, uscita allarme. | ||||
| Funzione di protezione | Hardware | Sovratensione, sottotensione, velocità eccessiva, surriscaldamento, sovraccarico, velocità eccessiva, allarme encoder e così via. | |||
| Software | Errore di posizione troppo grande, errore EEPROM e così via. | ||||
| Funzione di tracciamento dei dati di allarme | Registrare 4 gruppi di allarmi storici e dati pertinenti | ||||
| Funzione di comunicazione | Modbus RTU | ||||
| Posizione controllo modalità | Impulso di ingresso massimo frequenza | Modalità di ingresso differenziale: 500 Kpps Modalità di ingresso a collettore aperto: 200 Kpps | |||
| Modalità di comando a impulsi | Simbolo di impulso +, impulso ortogonale di fase A e B. | ||||
| Controllo dei comandi modalità | Comando impulso esterno, comando posizione multi-segmento | ||||
| Livellamento dei comandi modalità | Filtro passa basso,filtro FIR,livellamento a trapezio del comando posizione multi-segmento | ||||
| Rapporto elettronico | Rapporto elettronico: Multipli N/M (0.001< N/M< 64000 = N: 1~230, M: 1~230 | ||||
| Precisione della posizione | comando a impulsi ±1 | ||||
| Velocità di trasmissione modalità di controllo | Controllo dei comandi modalità | Impulso esterno, comando digitale della velocità, comando di velocità multistadio, comando di spostamento a intermittenza | |||
| Livellamento dei comandi modalità | Filtraggio passa-basso, curva S uniforme | ||||
| Limite di coppia | Limite di impostazione digitale | ||||
| Rapporto di regolazione della velocità | 1:5000 (encoder a 23 bit) | Velocità minima/velocità di rotazione nominale di funzionamento stabile continuo sotto il carico nominale | |||
| Larghezza di banda | Non inferiore a 400 Hz (encoder a 23 bit) | ||||
| Rapporto di fluttuazione della velocità | Fluttuazione del carico (0-100%) | Massimo 0.1% | Per un encoder a 23 bit, quando il comando di velocità è la velocità di rotazione nominale, (velocità di rotazione senza carico - velocità di rotazione a pieno carico)/rotazione nominale velocità. | ||
| Variazione della tensione di alimentazione ±10% | Massimo 0.1% | ||||
| Temperatura ambiente (0~50ºC ) | Massimo 0.1% | ||||
| Coppia controllo modalità | Controllo dei comandi modalità | Comando di coppia digitale | |||
| Livellamento dei comandi modalità | Filtraggio passa-basso | ||||
| Limite di velocità | Limite di impostazione digitale | ||||
| Precisione | ±3% (precisione di ripetizione corrente) | ||||








